Первая версия управляла аппаратом Мини МХ. Сначала робот был собран на универсальной макетной плате
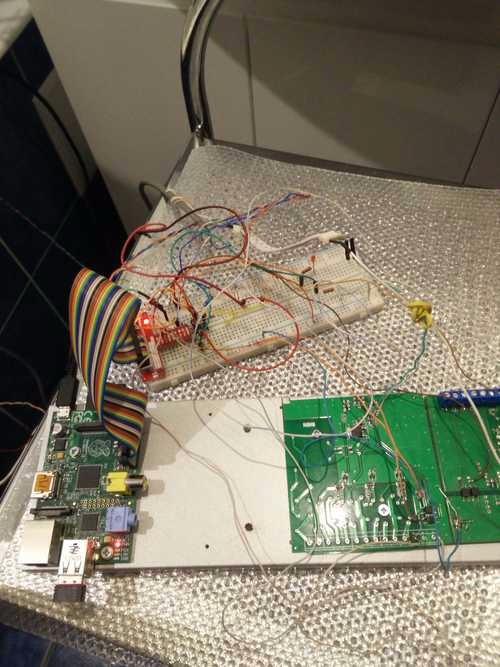{kind=link}
После обкатки алгоритмов аппаратная часть робота была перенесена на специализированную макетную плату для Raspberry Pi, элементы к которой были уже припаяны.
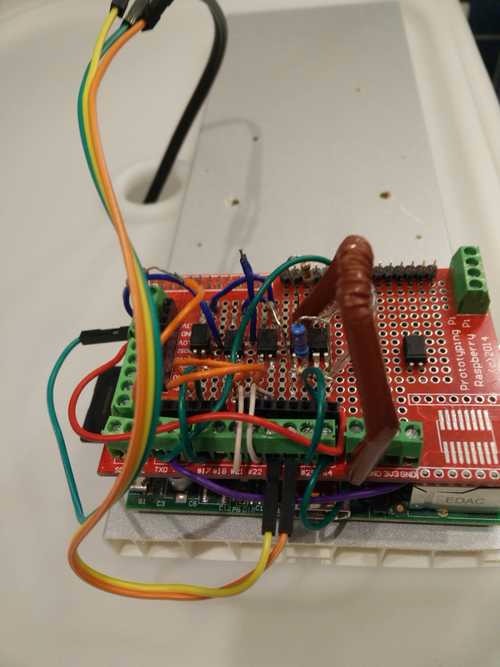{kind=link}
Был создан датчик голов, основанный на замыкании дистиллятом двух проводников.
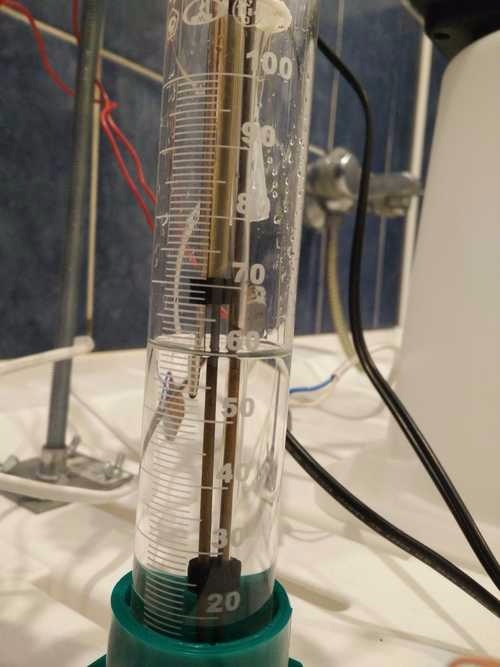{kind=link}
Используется три проводника: один общий и два сигнальных для фиксации моментов:
- начала отбора голов
- достижения заданного уровня голов в ёмкости, что служит сигналом к переключению на отбор тела.
Для разделения фракций дробной перегонки используются два трёхходовых соленоидных клапана
{kind=link}
Первая версия дистилляционного робота в сборе.
{kind=link}
За процессом можно следить на экране своего смартфона, планшета или ПК, зайдя на встроенный веб-сайт
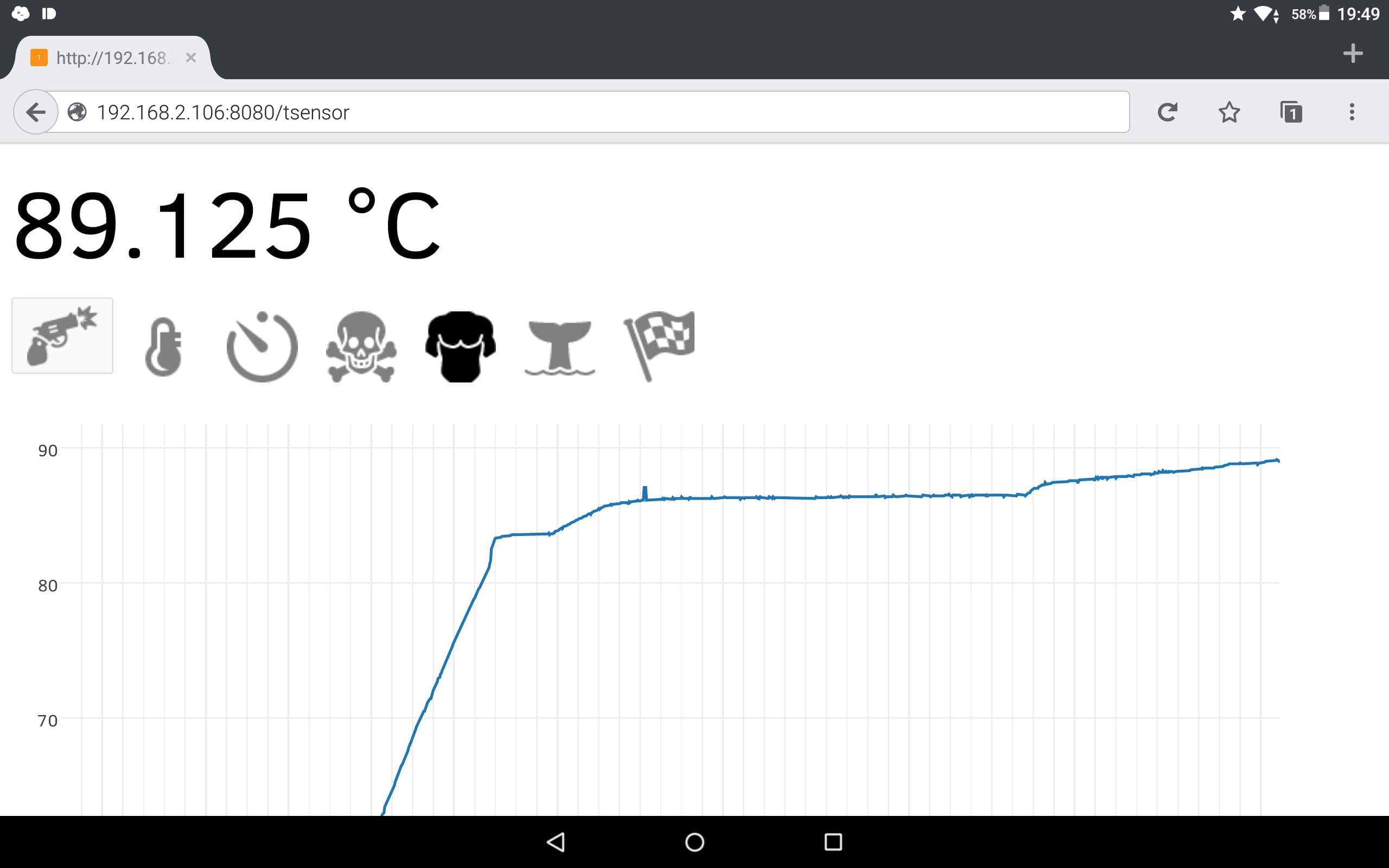{kind=link}
Протокол работы робот записывает в протокол (csv файл), который легко конвертировать в график
Вторая версия в стадии пусконаладки. Среди новшеств:
- включение охлаждения автоматически при достижения заданного температурного порога
- датчик потока воды на выходе системы охлаждения для экстренной остановки процесса, если с охлаждением что-то не так
- контроль температуры как в кубе, так и на входе холодильника
- автоматический сброс содержимого сухопарника
- оптический датчик голов
{kind=link}